

Forskerne fikk boltre seg med tester av robotkjøretøy og droneflyvning i en ubrukt dreneringstunnel i Hellas. Foto: SINTEF
– Målet er en fullstendig automatisert inspeksjonsprosess, forteller Henrik Lundkvist, seniorforsker i SINTEF.

Lundkvist er også leder for den norske delen av det store EU-prosjektet PILOTING der 14 partnere jobber med nye løsninger for inspeksjon og vedlikehold av visse typer infrastruktur. SINTEFs innsats har vært konsentrert rundt utvikling av sensorer for bruk i tunneler.
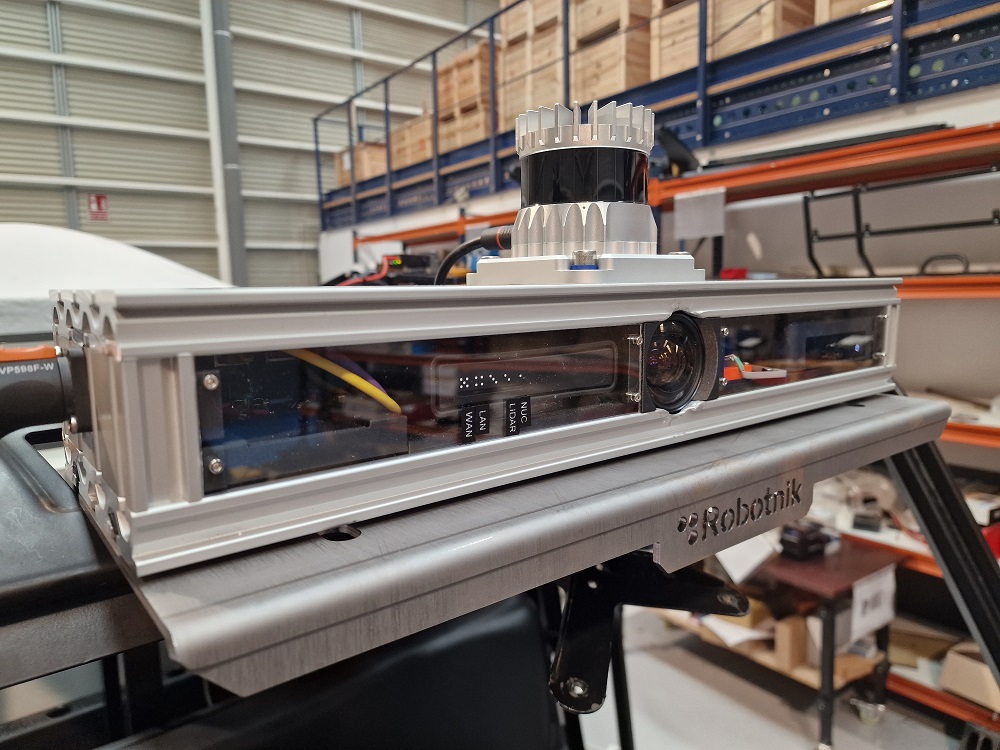
Forestill deg en golfbil. Omtrent slik kan det robotiserte kjøretøyet se ut. «Golferen» er erstattet med en rekke sensorer. Kjøretøyet er selvgående. Sensorene hjelper den å styre og holde orden på hvor i tunnelen den befinner seg. På taket står en drone klar til korte flyveoppdrag om det trengs mer nøyaktige avbildninger.
– En del av arbeidet i PILOTING har gått ut på å utvikle slike kjøretøyer og sensorene de trenger for å navigere i en tunnel. Ved hjelp av kameraer og en laserskanner skal de – og dronene – kunne registrere tilstanden til tunnelen og følge med på utviklingen av sprekker, rust og liknende.
Målet er ambisiøst: med selvgående robotiserte bakkekjøretøy skal tiden som brukes på inspeksjoner av tunneler reduseres med 80 prosent. Kostnadene skal reduseres med 30 prosent.
Resultatene kan blant annet bli kortere nedstengninger og økt sikkerhet på grunn av redusert behov for mennesker i tunnelene. Reduserte kostnader kan også bidra til at inspeksjoner kan gjennomføres hyppigere med økt sikkerhet som resultat.
Lundkvist legger til at en automatisert inspeksjonsprosess også kan bidra til at dataene som samles over tid blir mer konsistente enn hva mennesker får til. Slurv og unøyaktigheter blir en saga blott.
PILOTING består av tre pilotprosjekter: tunneler, raffinerier og broer og viadukter. De 14 partnerne i prosjektet representerer industri, universiteter og forskningsinstitutter, leverandører av programvare og sluttbrukere. SINTEF er eneste norske partner.

SINTEFs bidrag til prosjektet har vært å utvikle sensorsystemet og sørge for at de hjelper kjøretøyet med presis posisjonering i tunnelen. Den store utfordringen er at en ikke kan belage seg på verdens mest kjente og brukte posisjoneringssystem – GPS. Det krever nemlig relativt fri sikt til én eller flere av satellittene som utgjør navigasjonssystemet, og fungerer ikke under titalls eller hundretalls av meter med berg.
– Det enkleste alternativet er odometri (måling av hjulrotasjonen), men dette blir ikke presist nok fordi hjulene kan skli og fordi diameterne på hjulene kan variere avhengig av lufttrykket i dekkene, forklarer seniorforskeren.
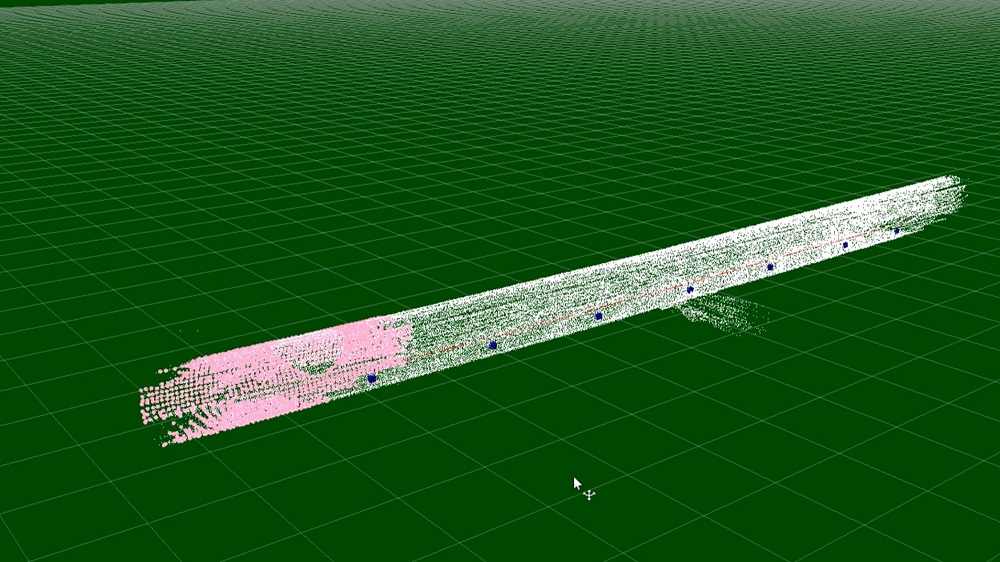
Derfor har SINTEF undersøkt hvordan de kan ta i bruk en kombinasjon av ulike sensorer for å oppnå en svært presis posisjon. Én viktig sensor er laserskanner (LIDAR).
– Laserskanner gir en nøyaktig avstandsmåling. Det lar kjøretøyet få god oversikt over hvor den befinner seg i forhold til tak og vegger, men ikke nødvendigvis i lengderetningen.
Dette er den andre, store utfordringen. Tunneler kan oppleves som svært monotone, også for roboter. Uansett hvor du befinner deg i en tunnel, vil utsikten være omtrent den samme – geometrien er nokså lik langs hele tunnellengden, og en kan ikke alltid se enden.
Derfor benytter forskerne også et kamera som kan registrere visuelle holdepunkter som bergmarkeringer, skilt og lysrigger for å presist fastslå posisjonen i tunnelen.
SINTEF-forskerne har også tenkt tanken om å plassere ut små skilt med QR-koder for å bygge et unikt referansesystem i tunneler. Andre sensorer på «golfbilen» inkluderer et instrument for bevegelsesmålinger og det gode, gamle odometeret.

For andre partnere i PILOTING har arbeidet dreid seg om å utvikle en plattform for datahåndtering.
– Robotene og deres sensorer vil samle inn et vell av ulike data. Disse dataene må harmoniseres slik at de i kombinasjon kan gi informasjon om posisjonen, men også om jobben de utfører – inspeksjonsdataene.
Inspeksjonsdataene kommer hovedsakelig fra to kilder: kameraer og laserskannere. Dette er ikke de samme som brukes for posisjonering, men som er bedre tilpasset for å samle inn inspeksjonsdata av høy kvalitet. Både kameraene og laserskannerne gir informasjon om tilstanden til tunnelen og infrastrukturen i tunnelen, deriblant observasjoner om sprekker, rust og skader.
Plattformen som tar imot informasjon fra sensorene, sender inspeksjonsdataene gjennom en algoritme som er trent opp til å gjenkjenne uregelmessigheter. Disse kan overvåkes over tid og håndteres i god tid før de utgjør noen trussel.
PILOTING-prosjektet har benyttet en 3,5 km lang vegtunnel og en mindre dreneringstunnel nord i Hellas som det primære testområdet for teknologien. De første testene ble utført høsten 2022, og forskerne høstet verdifull erfaring om hvilke deler av systemet som fungerte og hva som krever utbedringer. Høsten 2023 skal de siste testene gjennomføres.
– Innen da håper vi å ha fått gjennomført de forbedringene som trengs slik at alt vil fungere som det skal. Målet er at kjøretøyene og dronene skal jobbe autonomt med nøyaktige posisjonsdata, og samle inn inspeksjonsdata som kan knyttes til deres eksakte posisjon. Det krever at alle sensorer fungerer som de skal og at systemene sørger for at de ulike komponentene «snakker sammen», oppsummerer Lundkvist.
Med lovnader om betydelig redusert tidsbruk og kostnader, bør tunnelentreprenørene fatte interesse for teknologien og metodene som utvikles.
Selv om prosjektet ennå ikke er avsluttet, forteller Lundkvist at de er i dialog med norske interessenter.
SINTEF har fått finansiering av Norges forskningsråd for å tilrettelegge for bruk av resultatene for norske aktører, hovedsakelig for inspeksjon av tunneler.
Seniorforskeren forteller at løsningen nylig ble testet ut under «norske forhold». Montert på en av Statens vegvesens inspeksjonsbiler, ble SINTEFs sensorpakke prøvd ut i Runehamartunnelen, en testtunnel i Rauma kommune i Møre og Romsdal.
Runehamartunnelen (som består av flere veitunneler) har vært stengt for trafikk i årevis, og siden blitt brukt som en lokalitet for fullskala tester av blant annet brannforsøk, inkludert isolasjonsmaterialer, forebyggende tiltak og evakuering i forbindelse med røykutvikling.
Testene av det autonome kjøretøyet i en norsk tunnel kan bane veien for at Statens vegvesen i fremtiden implementerer den nye teknologien. Da kan tunnelinspeksjoner i Norge utføres sikrere, raskere og med høyere presisjon enn tidligere. Til nytte for samfunnet.
Flere former for tunnelinspeksjoner
Statens vegvesen har ansvaret for inspeksjon og vedlikehold av norske tunneler. Inspeksjonene gjøres i henhold til retningslinjene i Håndbok 610 Standard for drift og vedlikehold av riksveger.
Det opplyser Corinne Chiodini, tunnelkoordinator i Statens vegvesen Drift og vedlikehold.
Kort oppsummert gjennomføres det tre typer periodiske inspeksjoner av norske tunneler: generell inspeksjon, enkeltinspeksjon og hovedinspeksjon. I utgangspunktet skal disse utføres henholdsvis ukentlig, årlig og minimum hvert femte år. Inspeksjonene vil imidlertid være tilpasset lokale forhold som trafikkmengde og tunnelklasse (standard, konstruksjonstype etc.).
Generell inspeksjon foretas ved kjøring gjennom tunnelen og krever normalt ikke stengning, men eventuelt trafikkregulering. Behovet for generelle inspeksjoner varierer mye i landet. I høytrafikkerte tunneler vil behovet for inspeksjoner reduseres om det gjennomføres hyppige driftsoppgaver, og frafalle der videoovervåkning kan detektere farlige forhold.
Enkeltinspeksjonene er mer omfattende og involverer flere fag (konstruksjon, byggteknisk, elektroteknisk) og foregår årlig eller kontinuerlig avhengig av trafikkmengde og tunnelklassen/standard. I tunneler med bart berg, kombineres ofte enkelinspeksjon med spettrensk.
Hovedinspeksjon i tunnel handler i dag kun om undersøkelse av berg og bergsikring, ifølge Chiodini. Stengningsbehovet ved slike inspeksjoner er avhengig av både tunnelløplengde og tilgjengelighet til bergsikringen. I tunneler med hvelv er inspeksjoner av berg og bergsikring mer tidskrevende da en må klatre bak hvelv.
På spørsmål om hvor ofte og hvor lenge tunneler stenges i forbindelse med inspeksjoner, opplyser Chiodini at tunneler stenges for både drift og vedlikehold ved forskjellige typer inspeksjoner, vask, tilsyn, elektro etc. Det er dermed ikke mulig å gi et eksakt svar på dette.
Hun legger til at oppgavene koordineres og stengingene samkjøres i størst mulig grad for å redusere ulemper for trafikanter og sørge for maksimalt oppetid.
Statens vegvesen skriver på sine nettsider at en riksvegtunnel som er lengre enn 500 meter i snitt stenges én gang i måneden for inspeksjon og vedlikehold.
Retningslinjen R610 er for øvrig under revidering, og forventes å bli utgitt før sommeren 2024.
")